ChCore研究
ChCore研究
rust-chcore准备重构chcore v1的lab1和lab2.
我们首先肯定要对lab1和lab2本身有了充分的了解,然后才好下手开始项目的重构。
现在准备在ChatGPT等大模型和网上各种资料的辅助下,完成对ChCore的源代码的初步了解。
切换到lab2分支。
环境配置
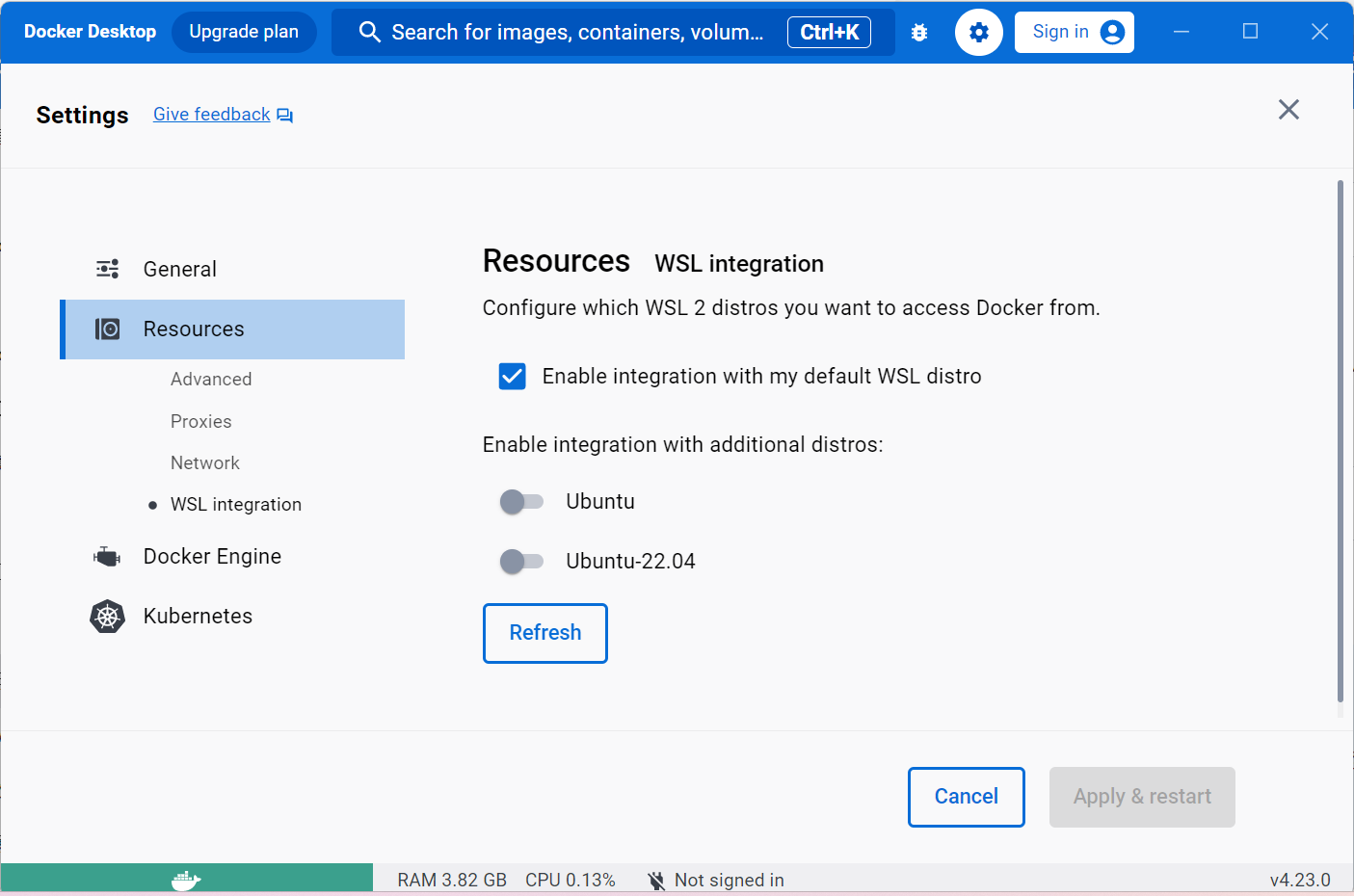
Windows 上的 Docker Desktop WSL 2 后端 |Docker 文档
在docker desktop中启用WSL集成。这样就可以在WSL2子系统中直接用docker了。
开始拉取docker镜像。


成功学会用gdb学会调试。
根目录各文件解释
config.cmake
这段代码是用 CMake 语言编写的,用于定义三个配置变量:CHCORE_CROSS_COMPILE、CHCORE_PLAT 和 CHCORE_VERBOSE_BUILD。
- chcore_config(CHCORE_CROSS_COMPILE STRING “” “Prefix for cross compiling toolchain”):定义一个名为 CHCORE_CROSS_COMPILE 的配置变量,类型为字符串,初始值为空字符串。这个变量用于指定交叉编译工具链的前缀。
- chcore_config(CHCORE_PLAT STRING “” “Target hardware platform”):定义一个名为 CHCORE_PLAT 的配置变量,类型为字符串,初始值为空字符串。这个变量用于指定目标硬件平台。
- chcore_config(CHCORE_VERBOSE_BUILD BOOL OFF “Generate verbose build log?”):定义一个名为 CHCORE_VERBOSE_BUILD 的配置变量,类型为布尔值,初始值为关。这个变量用于指定是否生成详细的构建日志。
- chcore_config_include(kernel/config.cmake):将名为 kernel/config.cmake 的文件包含到当前 CMakeLists.txt 文件中。这个文件可能包含了与当前项目相关的配置信息。
CMakeLists.txt
rust OS研究
同时,有c和rust在系统引导方面似乎有些不同,所以要找一下arm平台的rust系统教程。
https://github.com/rust-embedded/rust-raspberrypi-OS-tutorials
首先要在linux上安装rust环境,github文档上也有响应的说明,这个安装过程还挺久的。
实现路径
初步猜想
目前大概有这样的实现路径想法(不过很有可能搞不成),就是chcore可以分为两个部分,其中一个部分是引导内核启动的程序,另一部分就是chcore的内核。
在引导内核启动这一块,rust和c的区别可能比较大,而我们实际想要做的重构工作主要是面对内核的。
所以我的想法是在引导内核启动的初始化这一块就参考现有rust的,目前也找到了能够跑在raspberrypi的rust-raspberrypi-OS-tutorials。然后我们进一步的工作把chcore的内核重构成rust,并和这个rust os的初始化相适应(或者说是修改这个rust-raspberrypi-OS的内核)。
由于内核的代码量也不是很多,所以乐观估计工作量应该不大。
没想到让rust os运行起来都这么费劲。pull的时候那个888还卡住了。