无人车路径规划与避障综述整理
各综述算法分类
总体分类
A_Survey_of_Indoor_UAV_Obstacle_Avoidance_Research
- 检测
- 规划
- 控制
A Review on Obstacle Avoidance Techniques for Self-Driving Vehicle
也是这样分的:

- Self-Driving Vehicle Sensors
- Obstacle Detection Technology
- Obstacle Avoidance Technology
- Key Challenges
RETRACTED: Obstacle Avoidance Algorithms: A Review
这篇论文的分类没看懂,应该是着重在导航规划
Obstacle Avoidance Strategies
- Classical or Traditional Methods
- Heuristic Methods
- Comparisons/Combinations
- Importance of Sensors/Scanners.
A Review on Path Planning and Obstacle Avoidance Algorithms for Autonomous Mobile Robots
主要在导航规划
分为
- Classical Approach 经典/传统方法
- Heuristic Approach 启发式方法
路径规划分类
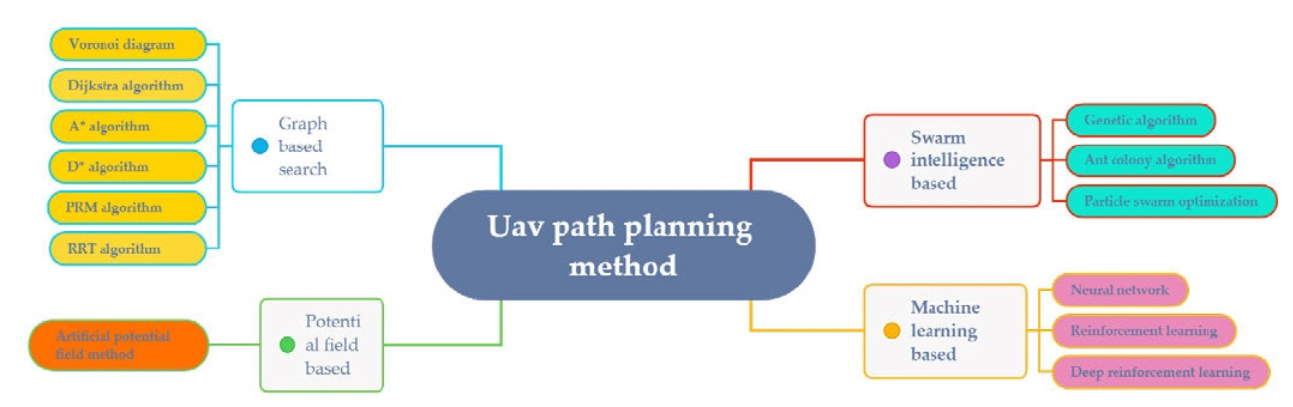
A_Survey_of_Indoor_UAV_Obstacle_Avoidance_Research
路径规划问题属于NP难题, 实际上可以利用各种算法进行优化
本文根据航迹规划中建立的不同优化模型, 将其分为以下四类:
基于图搜索的方法
- Voronoi图
- Dijkstra算法
- A* 算法
- D* 算法
- PRM算法
- RRT算法
基于势场的方法
- 人工势场法
基于种群智能的方法
基于机器学习的方法
- 神经网络
- 强化学习
- 深度强化学习
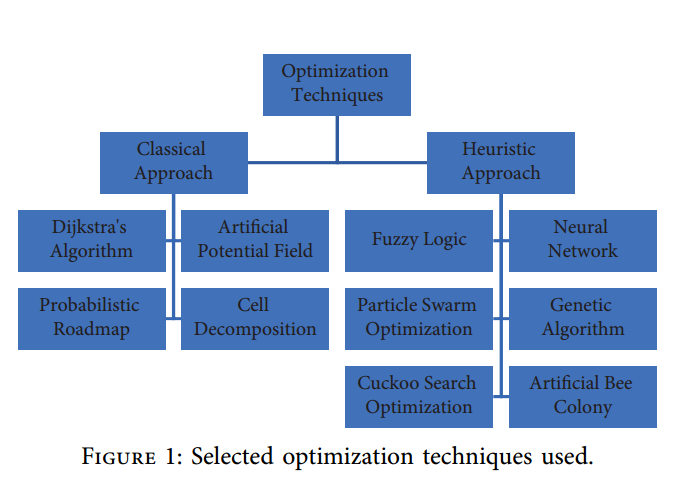
A Review on Path Planning and Obstacle Avoidance Algorithms for Autonomous Mobile Robots
Classical Approach 经典/传统方法
- Dijkstra算法
- APF 人工势场法
- PRM 概率路图
- Cell Decomposition 细胞分解
Heuristic Approach 启发式方法
- Fuzzy Logic 模糊逻辑
- Neural Network 神经网络
- Particle Swarm Optimization 粒子群
- Genetic Algorithm 遗传算法
- Cuckoo Search Algorithm 布谷鸟搜索算法
- Artifcial Bee Colony 人工蜂群算法
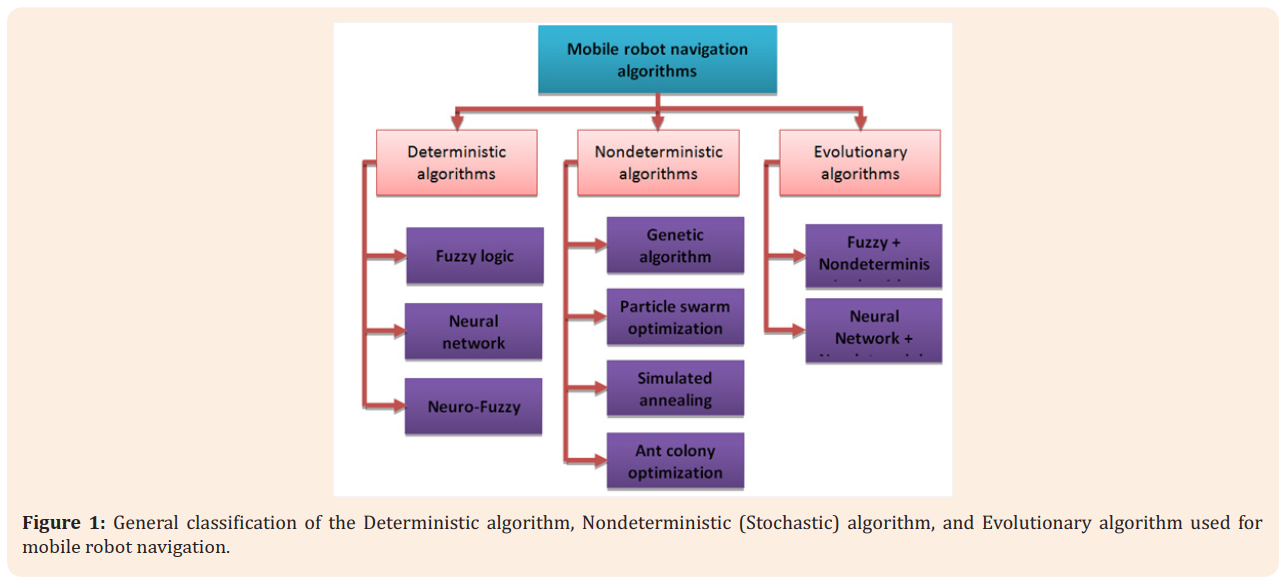
Mobile Robot Navigation and Obstacle Avoidance Techniques: A Review
Deterministic algorithm 确定性算法
- Fuzzy Logic 模糊逻辑
- Neural Network 神经网络
- Neuro-Fuzzy
Nondeterministic (Stochastic) algorithm 不确定性算法
- Genetic Algorithm 遗传算法
- Particle Swarm Optimization 粒子群最优化算法
- Simulated Annealing Algorithm 模拟退火算法
- Ant Colony Optimization Algorithm 蚁群最优化算法
Evolutionary algorithm 进化算法(融合上面两种)
- Hybridization of Fuzzy and Nondeterministic Algorithm 模糊与不确定性算法的杂交
- Hybridization of Neural Network and Nondeterministic Algorithm 神经网络与不确定性算法的杂交
全局
局部
初步的分类方法
常见的流行的分类:
- 基于势场的方法
- 基于模糊逻辑的方法
- 基于群体智能的方法(又称进化算法)
- 基于图搜索的方法
- 杂交方法(融合方法)
另外一种分法,按照算法本身的流程和性质:
- Monolithic Algorithm 单体算法
- 基于势场的方法
- 基于模糊逻辑的方法
- 基于图搜索的方法
- Swarm Intelligence Algorithm 基于群体智能的方法(又称进化算法)
还想到一种,按照机器人本身的数量:
- Single Robot Planning单体机器人路径规划
- 基于势场的方法
- 基于模糊逻辑的方法
- 基于群体智能的方法(又称进化算法)
- 基于图搜索的方法
- 杂交方法(融合方法)
- Multi-Robot Planning集群机器人路径规划
- 协同路径规划算法
- 分布式路径规划算法
数量统计
- 基于势场的方法 many
- 基于模糊逻辑的方法 4~5篇
- 基于群体智能的方法(又称进化算法)
- 遗传算法 0
- 蚁群算法 2
- 粒子群算法 1
- 人工蜂群算法 0
- 基于图搜索的方法 many
- 杂交方法(融合方法)
无人车路径规划与避障综述整理
http://thinkerhui.site/2023/11/25/无人车大创/无人车路径规划与避障综述整理/